Neue Multikopter-Plattform COMET: Erster Testprototyp im Miniformat entwickelt

10. April 2025
An der FH Technikum Wien wurde im Kompetenzfeld Embedded Systems die neue Multikopter-Plattform COMET (“Cost-efficient Open-Source Multikopter for Embedded-Systems Teaching”) speziell für den Einsatz in Lehre und Forschung konzipiert.
Im Rahmen der Forschung bezüglich funktionaler Sicherheit im Bereich der Drohnentechnik wurde am Kompetenzfeld Embedded Systems an der FH Technikum Wien der erste interne Testprototyp einer kompakten Multikopter-Plattform im Miniformat entwickelt. Das System dient als universelle Lehr-, Test- und Forschungsplattform mit dem Ziel, eine dokumentierte Open-Source-Lösung für sichere Hexakopter bereitzustellen.
Vielseitige Plattform für Lehre und Forschung
Die neue Multikopter-Plattform namens COMET (“Cost-efficient Open-Source Multikopter for Embedded-Systems Teaching”) wurde speziell für den Einsatz in Lehre und Forschung konzipiert. Studierende können sie in Bachelor- und Masterarbeiten nutzen, um verschiedene Anwendungen und Steuerungskonzepte zu erproben. Zudem dient sie als interne Testplattform im Rahmen des FFG-Projekts SAMURAI und soll in künftigen Forschungsprojekten weiterentwickelt werden.
Eigenentwicklung mit innovativem Design
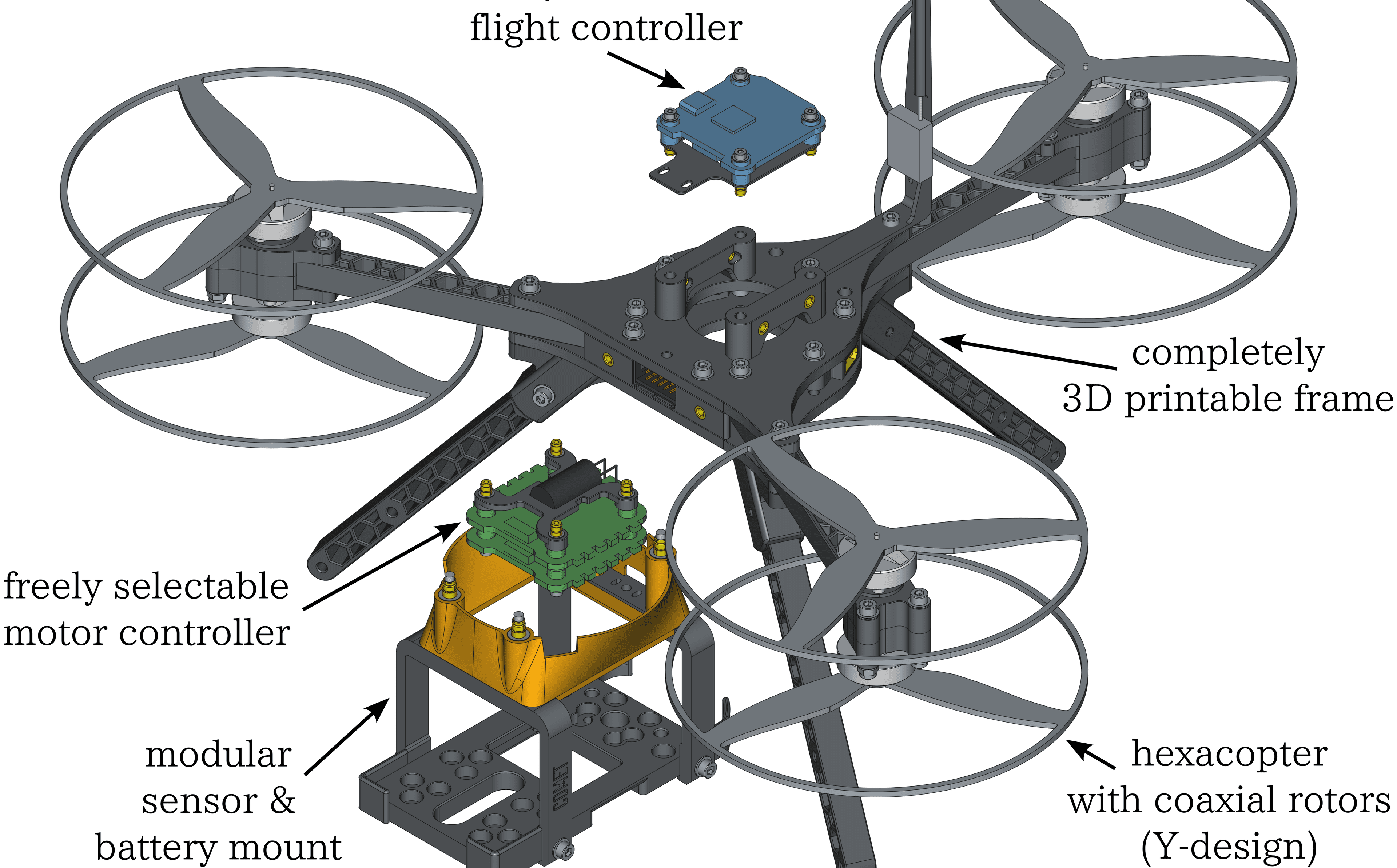
COMET wurde in Eigenregie entwickelt, da es bislang keine gut dokumentierten Open-Source-Projekte für zuverlässige Hexakopter im Y-Design gibt, die funktionale Sicherheit gewährleisten. Die Plattform wurde mittels CAD-Software entworfen, und der erste Prototyp wurde erfolgreich gedruckt und montiert. Dieser innovative Ansatz ermöglicht eine flexible und kosteneffiziente Nutzung in verschiedenen technischen Anwendungsbereichen. Eine Besonderheit ist, dass sich (bis auf Elektronik und Montageteile) alle Teile vollständig im 3D Druck herstellen lassen. Das bedeutet, dass man nicht auf extern zugekaufte Rahmen, welche möglicherweise nach einiger Zeit nicht mehr verfügbar sind, angewiesen ist. Dies bringt deutlich mehr Flexibilität bezüglich Sensorik für die Plattform.
Mit der Entwicklung des COMET-Prototyps setzt die FH Technikum Wien einen wichtigen Schritt in der Forschung und Lehre von Multikopter-Technologien und bietet Studierenden sowie Forschenden eine leistungsfähige Plattform für künftige Projekte.
SAMURAI bündelt die Expertise österreichischer Unternehmen und Forschungseinrichtungen auf dem Gebiet der Multirotor-Hard- und Software. Das Team besteht aus der Fachhochschule Technikum Wien, der Universität Klagenfurt (AAU), konkret die Forschungsgruppe Control of Networked Systems (CNS), Infineon Technologies Austria AG (IFAT) und der twins GmbH (TWINS).
Dieses Projekt wird von der FFG (Take Off Call 2023) unter der Förderung FO999913968 finanziert und von der UASTW koordiniert.
Das SAMURAI-Projekt wird von Roman Beneder (Projektleitung), Patrick Schmitt (stellvertretende Projektleitung), Johannes Anderle und Volker Tenta (beide wissenschaftlicher Mitarbeiter für Elektronikdesign und Embedded Systems Software) und Christoph Böhm (wissenschaftlicher Mitarbeiter für Embedded Control Systems und Zustandsschätzung für UAVs) ausgeführt.
Weiterführende Links:
Kompetenzfeld Embedded Systems
Fakultät Electronic Engineering & Entrepreneurship
Kickoff von SAMURAI: Sicheres Fliegen für Multikopter-Drohnen
FFG Safe Multikopter for Reliable Aviation (SAMURAI)
SAMURAI – Forschungsprojekt – FH Technikum Wien
FFG Projektdatenbank – SAMURAI – SAfe MUltikopter for Reliable AvIation
Autonom auf Abstand: FHTW-Team mit Quadkopter-Vorführung zu Gast bei Infineon in Graz
DrohnFH – Neues Projekt bringt Drohnen in die Lehre
FFG – Österreichische Forschungsförderungsgesellschaft